1 条题解
-
0
自动搬运
来自洛谷,原作者为

Diaоsi
Enemy of God搬运于
2025-08-24 22:48:24,当前版本为作者最后更新于2025-03-03 13:33:39,作者可能在搬运后再次修改,您可在原文处查看最新版自动搬运只会搬运当前题目点赞数最高的题解,您可前往洛谷题解查看更多
以下是正文
[ICPC 2021 WF] Guardians of the Gallery
如果把问题变成让保安走到雕塑所在的位置该怎么做?类似于 Airport Construction 的分析,保安只会走多边形顶点之间的线段(起点终点也当作顶点)。枚举两端点判断线段是否在多边形内,然后建图跑最短路。
回到原问题,发现能够看到雕塑的位置是多边形内的一个区域。而这个区域的边界形如雕塑位置和多边形上端点的连线(被一个“角”所遮挡视线)。
枚举这些射线,找到在多边形内的极长线段(即最长的合法可视边界)。求出每个顶点到这条线段的最短路线,判断这条路线是否在多边形内并更新该顶点到雕塑的最短距离。
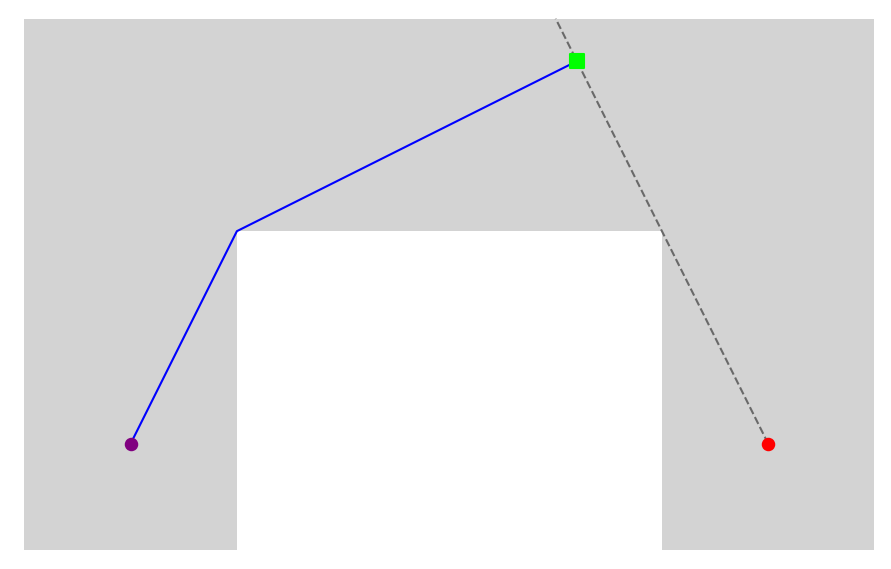
但是真的有这么简单吗?仔细思考一下,发现存在许多 corner case。首先,可视边界与多边形的边的交点可能作为终点:
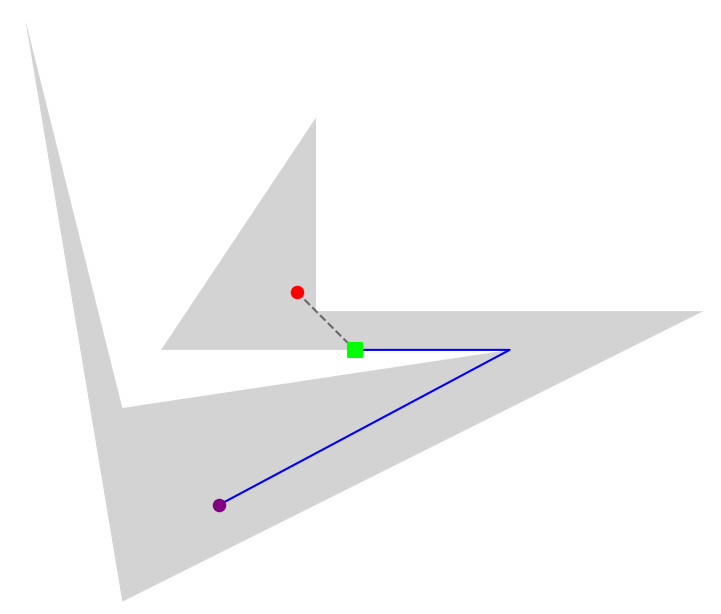
其次,可视区域要求能够至少看到雕塑的一半,因此这条射线不能被“双边遮挡”:
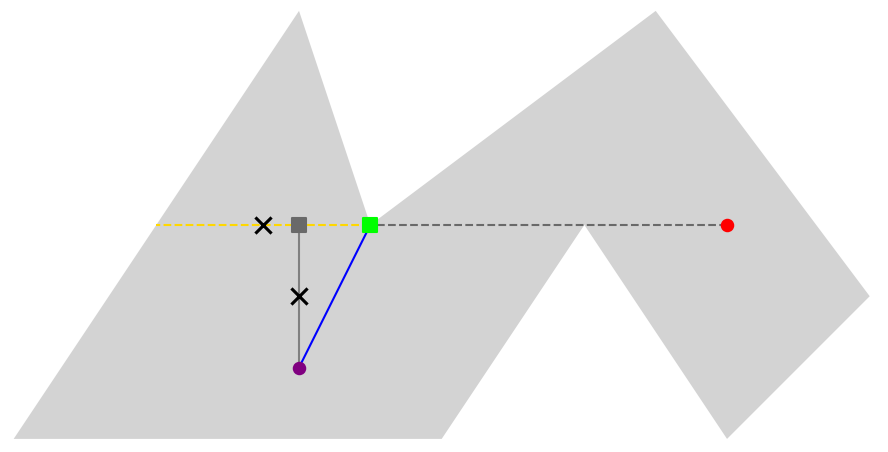
如上图,走到黄色虚线处是无法看到雕塑的,最短路径是走到绿色方点处。判断是否“双边遮挡”的方法有很多,可以开计数器分别记录射线左右两边分别有多少个端点与线段相切。保安的路线不需要判断“双边遮挡”。
分析一下我们干了啥:枚举雕塑沿着顶点方向射线、求出这条射线与多边形的所有交点、更新每个顶点到这个点最短距离(需要判断合法)。直接实现的复杂度是 的,精细实现可以做到 。
判断遮挡的部分参考了
https://www.luogu.com.cn/user/151935#include<bits/stdc++.h> #define fi first #define se second #define mp make_pair #define pb push_back typedef long long ll; typedef double ld; using namespace std; const int N=210,M=20010,INF=0x3f3f3f3f; const ld eps=1e-9,pi=acos(-1),inf=1e18; mt19937_64 rnd(chrono::steady_clock::now().time_since_epoch().count()); int dcmp(ld x){return x<-eps?-1:(x>eps?1:0);} struct node{ ld x,y; node(ld xx=0,ld yy=0){x=xx,y=yy;} void in(){cin>>x>>y;} void out(){cout<<'('<<x<<','<<y<<')'<<'\n';} bool operator <(const node &a)const{ return dcmp(x-a.x)?x<a.x:y<a.y;//x!=a.x } bool operator >(const node &a)const{ return dcmp(x-a.x)?x>a.x:y>a.y;//x!=a.x } bool operator ==(const node &a)const{ return !dcmp(x-a.x)&&!dcmp(y-a.y);//x==a.x&&y==a.y } bool operator !=(const node &a)const{ return dcmp(x-a.x)||dcmp(y-a.y);//x!=a.x||y!=a.y } }; node operator +(const node &a,const node &b){return node(a.x+b.x,a.y+b.y);} node operator -(const node &a,const node &b){return node(a.x-b.x,a.y-b.y);} node operator *(const ld &x,const node &a){return node(x*a.x,x*a.y);} node operator /(const node &a,const ld &x){return node(a.x/x,a.y/x);} ld operator *(const node &a,const node &b){return a.x*b.x+a.y*b.y;} ld operator ^(const node &a,const node &b){return a.x*b.y-a.y*b.x;} ld sqr(ld x){return x*x;} ld len(node a){return sqrt(a*a);} ld dist(node a,node b){return len(a-b);} node normal(node a){return node(-a.y,a.x);} node proj(node a,node b,node p){ node d=b-a; return a+((d*(p-a))/(d*d))*d; } bool contain(node a,node b,node c){ node x=a-b,y=c-b; return (!dcmp(x^y))&&(dcmp(x*y)<=0); } node intersect(node a,node b,node c,node d){ //intersection of two lines node x=b-a,y=d-c,z=a-c; return a+((y^z)/(x^y))*x; } bool check(node a,node b,node c,node d){ if(max(a.x,b.x)<min(c.x,d.x)||max(a.y,b.y)<min(c.y,d.y)|| max(c.x,d.x)<min(a.x,b.x)||max(c.y,d.y)<min(a.y,b.y))return 0; return 1; } int inter(node a,node b,node c,node d){ if(!check(a,b,c,d))return 0; node cd=d-c,ca=a-c,cb=b-c; ll x=dcmp(cd^ca),y=dcmp(cd^cb); if(x>0&&y>0)return 0; if(x<0&&y<0)return 0; if(x==0||y==0)return 1; node ab=b-a,ac=c-a,ad=d-a; x=dcmp(ab^ac),y=dcmp(ab^ad); if(x>0&&y>0)return 0; if(x<0&&y<0)return 0; if(x==0||y==0)return 1; return 2; } int n; ld g[N][N]; node p[N],s,e; vector<node> v; int pre(int i){return i==1?n:i-1;} int nxt(int i){return i==n?1:i+1;} bool lineonseg(node a,node b,node c,node d){ return dcmp((b-a)^(c-a))*dcmp((b-a)^(d-a))<=0; } bool parallel(node a,node b,node c,node d){ return !dcmp((b-a)^(d-c)); } bool inangle(node a,node b,node c){ if(dcmp(a^b)>0)return dcmp(a^c)>=0&&dcmp(c^b)>=0; return !(dcmp(b^c)>0&&dcmp(c^a)>0); } int cnt[3]; bool seginpoly(node a,node b,int op){ if(a==b)return 1; cnt[0]=cnt[1]=cnt[2]=0; for(int i=1;i<=n;i++){ node u=p[i],v=p[nxt(i)],w=p[pre(i)]; if(inter(a,b,u,v)==2)return 0; if(contain(a,u,b)){ if(a!=u&&!inangle(a-u,v-u,w-u))return 0; if(b!=u&&!inangle(b-u,v-u,w-u))return 0; if(op&&a!=u&&b!=u){ cnt[dcmp((v-u)^(b-a))+1]++; cnt[dcmp((w-u)^(b-a))+1]++; if(cnt[0]&&cnt[2])return 0; } } else{ if(a!=u&&a!=v&&contain(u,a,v)&&dcmp((b-a)^(v-u))>0)return 0; if(b!=u&&b!=v&&contain(u,b,v)&&dcmp((b-a)^(v-u))<0)return 0; } } return 1; } void ext(int w){ node a=p[w]; for(int i=1;i<=n+2;i++){ if(i==w)continue; node c=p[i],d=proj(e,a,c); if(seginpoly(c,d,0)&&seginpoly(d,e,1)){ g[i][n+2]=min(g[i][n+2],dist(c,d)); g[n+2][i]=min(g[n+2][i],dist(c,d)); } } for(int i=1;i<=n;i++){ node u=p[i],v=p[nxt(i)]; if(parallel(a,e,u,v))continue; node t=intersect(a,e,u,v); if(!seginpoly(e,t,1))continue; for(int j=1;j<=n+2;j++){ if(!seginpoly(p[j],t,0))continue; g[j][n+2]=min(g[j][n+2],dist(p[j],t)); g[n+2][j]=min(g[n+2][j],dist(p[j],t)); } } } int main(){ ios::sync_with_stdio(false);cin.tie(0);cout.tie(0); cin>>n; for(int i=1;i<=n;i++)p[i].in(); s.in();p[n+1]=s; e.in();p[n+2]=e; if(seginpoly(s,e,1)){ cout<<"0.000000000000000\n"; return 0; } for(int i=1;i<=n+2;i++) for(int j=1;j<=n+2;j++) if(i^j)g[i][j]=seginpoly(p[i],p[j],0)?dist(p[i],p[j]):inf; for(int i=1;i<=n+1;i++)ext(i); for(int k=1;k<=n+2;k++) for(int i=1;i<=n+2;i++) for(int j=1;j<=n+2;j++) g[i][j]=min(g[i][j],g[i][k]+g[k][j]); cout<<fixed<<setprecision(15)<<g[n+1][n+2]<<'\n'; return 0; }
- 1