1 条题解
-
0
自动搬运
来自洛谷,原作者为

yueyan_WZF
I Will Remember You Forever|| 87.122.102 || 模拟退火大法好 || 2025 rp++ !搬运于
2025-08-24 22:32:43,当前版本为作者最后更新于2024-10-03 18:11:17,作者可能在搬运后再次修改,您可在原文处查看最新版自动搬运只会搬运当前题目点赞数最高的题解,您可前往洛谷题解查看更多
以下是正文
这道题应该不需要用到二分。
Solution
大体:
通过题目描述,我们可以维护出在当前位置的上面、下面、左面、右面各有多少个控制点,这样我们只需要求出一开始时的距离总和同一个 坐标的控制点数量以及同一个 坐标的控制点数量,每次移动通过上次求出的距离总和来更新当前的位置总和。
具体:
(我把当前与机器人同一个 坐标的控制点归入右边,同一个 坐标的控制点归入上边,当然你也可以不这样,但做法还是一致的。)
首先输入时,我们统计出机器人在 的时候上下左右各有多少控制点和同一个 坐标的控制点数量以及同一个 坐标的控制点数量,并且算出此时的距离总和。
然后,我们按照题目要求模拟:
- 当输入的是
S时:
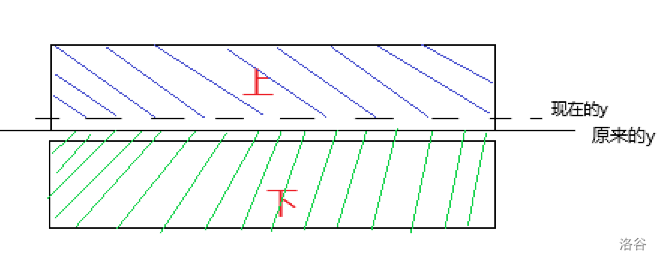
我们发现蓝色部分的距离是 的,绿色部分的距离是 的,显然与原来的 坐标相同的控制点距离要 ,与现在的 坐标相同的控制点距离要 。
改完距离后,我们再更新机器人上面的控制点个数和下面的控制点个数。
- 当输入的是
J时:
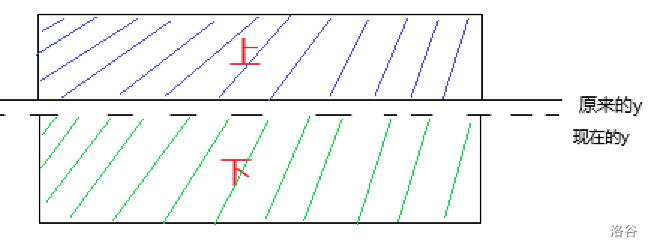
由于移动的距离为 ,所以移动后,蓝色部分的距离是 的,绿色部分是 的。
改完距离后,我们再更新机器人上面的控制点个数和下面的控制点个数。
- 当输入的是
I时:
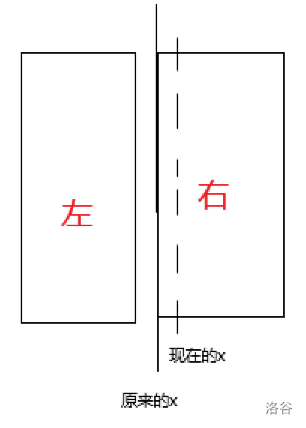
原理同输入为
S。- 当输入的是
Z时:
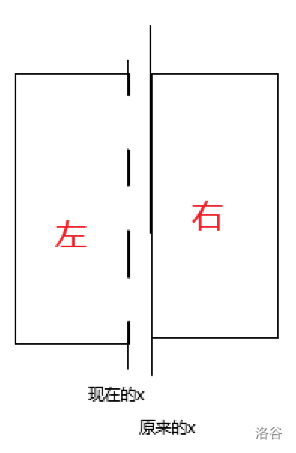
原理同输入为
J。
AC code
#include <bits/stdc++.h> #define int long long using namespace std; int x, y;//当前机器人坐标为 (x,y) int n, m; int sum; //距离总和 string opt; int sumx[40000004]; int sumy[40000004]; int up, down, _left, _right; //上下左右各有多少控制点 int _hash(int x) { return x + 10000010; } //由于坐标有负数不能直接当下标,所以来个简单的hash int hash_(int x) { return x - 10000000; } signed main() { scanf("%lld%lld", &n, &m); sum = 0; for (int i = 1; i <= n; i++) { int x, y; scanf("%lld%lld", &x, &y); sum += abs(x) + abs(y); if (y >= 0) up++; if (y < 0) down++; if (x >= 0) _right++; if (x < 0) _left++; x = _hash(x), y = _hash(y); sumx[x]++; //更新横坐标为 x 的控制点个数 sumy[y]++;// 更新纵坐标为 y 的控制点个数 } cin >> opt; x = 0, y = 0; for (int j = 0; j < m; j++) { if (opt[j] == 'S') { sum += (down + sumy[_hash(y)]); sum -= (up - sumy[_hash(y)]); down += sumy[_hash(y)]; up -= sumy[_hash(y)]; y++;//更新位置 } if (opt[j] == 'J') { sum += up; sum -= down; y--;//更新位置 down -= sumy[_hash(y)]; up += sumy[_hash(y)]; } if (opt[j] == 'I') { sum += (_left + sumx[_hash(x)]); sum -= (_right - sumx[_hash(x)]); _right -= sumx[_hash(x)]; _left += sumx[_hash(x)]; x++;//更新位置 } if (opt[j] == 'Z') { sum += _right; sum -= _left; x--;//更新位置 _left -= sumx[_hash(x)]; _right += sumx[_hash(x)]; } cout << sum << endl; } } - 当输入的是
- 1