1 条题解
-
0
自动搬运
来自洛谷,原作者为

璀璨星空1
倘若我们义无反顾去做不可能之事,世上便再没有不可能。搬运于
2025-08-24 21:56:45,当前版本为作者最后更新于2021-08-21 22:26:13,作者可能在搬运后再次修改,您可在原文处查看最新版自动搬运只会搬运当前题目点赞数最高的题解,您可前往洛谷题解查看更多
以下是正文
考虑先做第二问,再做第一问.
我们想要构造一种 轮均合法的移动操作,将 片针叶全部都移走;考虑先移走 1 片,将问题转化为 片针叶全部都移走,不难发现这是我们必须解决的,而且这样问题只会变简单.
哪 1 片针叶是可以立刻就移走的?比如说我们想要让这片针叶向下直接移走,那么这片针叶下面就不能有任何的阻碍,一个粗糙的想法是直接选择 坐标最靠下的那片针叶.
但是这样可能会出问题,如下图所示:
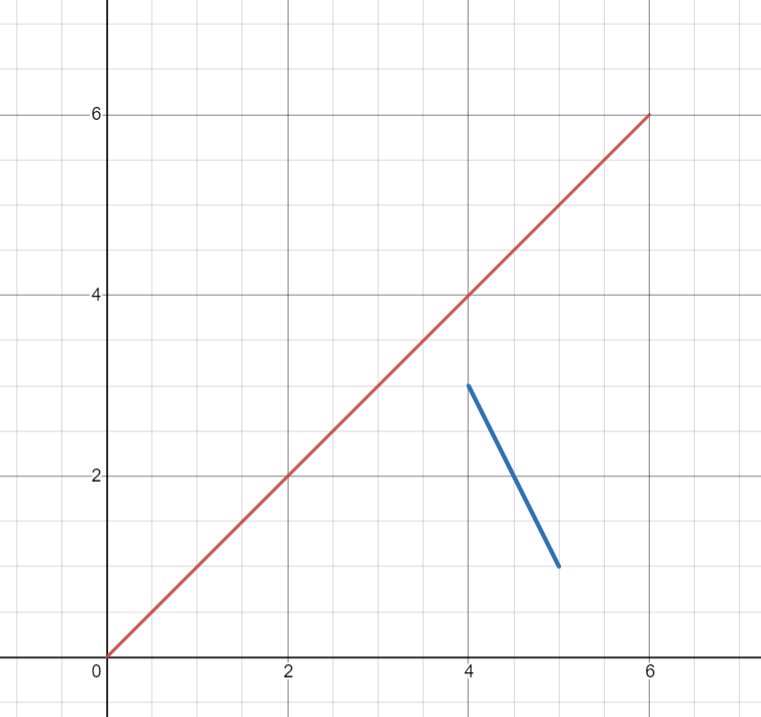
如果我们直接向下移动红色的针叶,会被蓝色的针叶所阻碍.
这启发我们,找到一片没有被任何针叶阻碍的针叶,还是以向下移走为例子,我们看,如果只考虑上下之间的障碍,能否一定能够找到一片,没有被任何针叶阻碍的针叶.
首先,如果针叶 阻碍了针叶 ,那么不可能反过来,也就是不可能针叶 能够阻碍针叶 .
因此,如果对于每个针叶 ,都看成一张图上的一个结点 ,那么这张图就是一张有向无环图.
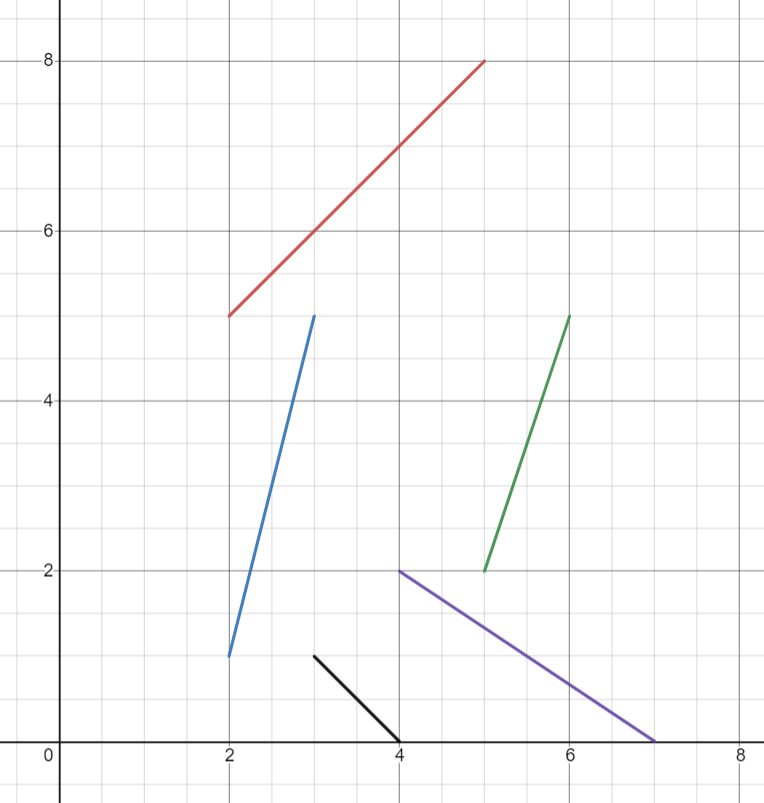
比如说对于我们的第一个样例而言,针叶建点,阻碍关系建边,就是这样一张图:
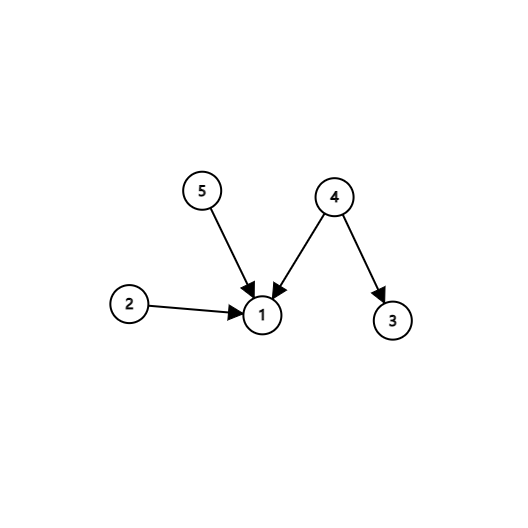
知道了有向无环图有什么用呢?任意一张有向无环图上,一定存在一个结点,没有任何入度.
反证法,如果所有结点都有入度,反图上所有结点就都有出度,此时我们任意选一个点不断走下去,瞎走一通,走到 步,就一定能找到一个环,这样原图上也就一定能找到一个环.
这样,我们一定能够找到一片针叶 ,可以向下直接移走 ;重复上述过程 步,就说明了一定存在一组合法的解,使得所有的针叶最终都是向下移动的.
这启示我们,如果能够把这张有向无环图真正建出来,它的拓扑序的逆序列就是一个合法的移动序列,按照这个移动序列,一片一片向下移动针叶即可.
直接建图需要枚举 条边,不能接受,考虑挖掘为了求出这个图的拓扑序,有什么好的性质.
注意到,如果针叶 阻碍了针叶 ,针叶 又阻碍了针叶 ,那么可以直接看作针叶 阻碍了针叶 ,即使这样的阻碍关系实际上并不存在,
只知道这个性质是没有什么用的,我们并不能刻画出一片针叶 “恰好” 被哪片针叶所阻碍,又能够 “恰好” 阻碍到哪片针叶.
考虑换一种方式刻画阻碍关系,不再思考点对点贡献,而是直接思考,某个给定的 坐标那条直线上,一条平行于 轴的直线,会产生什么样的阻碍关系.
假如不考虑边界情况,所有与这条直线有交点的针叶,两两之间都存在阻碍关系.
建图的时候,只要在相邻两片针叶之间,建一条边即可.
如果我们把这条直线稍稍向右移动一些,你可以认为移动了 的距离,还是不考虑边界情况,没有到达或者跨过整点,那么能建的边和刚才那条直线是完全一样的.
如果移动很多呢?即使跨过了很多整点,只要与这条直线有交点的针叶集合没有变化,能建的边就都不会有变化,回归点对点贡献的思考.
对于两片针叶 和 ,因为初始状态下两片针叶是无交点的,所以选哪条直线去截它们,能不能连边,连边的方向是什么,只要都截上了,就不会有任何区别.
也就是说,对于某个集合的针叶来说,对于所有能够把它们全截下来的,与 轴平行的直线,针叶之间内部连边的序不会有任何变化,哪片针叶在上面就永远会在上面,哪片在下面就永远会在下面.
用一条与 轴平行的扫描线,扫过整个平面, 坐标从 扫到 .
假设我们已经处理完了 的时候,所有直线能建的边,考虑处理 .
- 可能会新来一片针叶
- 需要确定在这片针叶上面的针叶中最靠下的,也就是前驱;再确定在这片针叶上面的针叶中最靠下的,也就是后继,那么新来的针叶阻碍了前驱,后继阻碍了新来的针叶.
- 用一个 ,可以维护所有,与目前扫描线有交点的针叶的编号,新来一片针叶,先在 中查询前驱、后继,之后在 中加入这片针叶即可.
- 可能会有一片针叶消失了
- 并不需要做什么事情,只要在 中删除这片针叶即可.
如果这样处理,可能会面临一些小问题:
- 如何重定义 的小于号,使得我们可以在不断改变的 坐标下比较两条线段的 坐标?
- 利用序不改变的性质,我们可以 ”欺骗“ :虽然我们传进去的小于号不是严格全序,但是在 的运作周期内,永远都不会发现这一点.
- 将每条直线用斜截式 表示,那么 和 是直线的参数, 是递增的, 是需要比较的关键字,之后我们重定义小于号,从某个全局参数处读取此时的 进行比较.
- 这就是说,在扫描线的过程中,每扫到一个有变化的 坐标,就微调一下小于号的规则.
- 因为前面提到的序不变的性质,在 的运作周期内,不可能发现该小于号不是严格全序.
- 如果同一条直线上,又有插入又有删除,该怎么处理?
- 不难发现,此时要插入的直线和要删除的直线之间,实际上是不能连边的.
- 对同一个 坐标对应的截线,只要一律先处理删除,再处理插入即可.
- 不难发现,此时要插入的直线和要删除的直线之间,实际上是不能连边的.
- 如此,对于每片针叶,我们会在刚扫到这片针叶的时候,让这片针叶连入、连出各不超过 1 条边,这样我们就建出来了,实际阻碍关系图的一张等效图,图上有 个结点和不超过 条有向边.
以上是考虑从上到下的阻碍关系建出来的图,我们对这张图作拓扑排序,令针叶 在这张图上的拓扑序为 ,同理,考虑从左到右的阻碍关系,令针叶 在那张图上的拓扑序为 .
对于第一个样例而言,一组可能的 和 分别是 和 .
按照拓扑序,将所有针叶向上移动,或者向右移动,可以正确回答所有数据点的第二问,时间复杂度为 ,在第一问上随便输出一个 ,就可以获得 分的好成绩.
这里要特别注意,实际考试如果遇到这样分步给分的题目,对不想回答的小问,一定要注意什么样的输出是不给分但是可以被接受的;在这道题中,如果第一问随意地输出了 ,就会导致第二问的分白白丢掉.
在验证了 和 的正确性之后,就可以考虑如何利用刚才的性质和结论,解决第一问了.
考虑如何判定一步给定的移动操作是不是合法的,这次以向上直接移动为例子.
将一片 坐标范围为 的针叶向上移动,假设这片针叶是 ,什么样的针叶 会对 造成阻碍呢?
注意到我们直接在刚才建出来的图上找是不可行的,有这样的一些原因:
- 可能有些针叶 能对 造成阻碍,但是我们把 移走了;
- 如果要处理移走了的针叶,仅仅靠一张等效图是不够的,而原图又没有办法建出来.
这里最大的问题,是我们要试图删除一片针叶,这会破坏这张等效图的等效性.
正难则反,删除操作不可行的时候,考虑逆转时间轴,时间倒流,考虑插入操作.
也就是说,我们从已经被移空了的平面开始,按照操作顺序的倒序,一片一片加入针叶,加入的过程就是从无穷远处移动回原来所在的地方,看哪些针叶会在这个加入的过程中被阻碍.
注意到如果这样做,是不可以剪枝的,必须考虑每一片针叶,因为有可能后来的针叶被阻碍了,前面的针叶也被阻碍,这也就意味着无论一片针叶有没有被阻碍,我们都要在平面上将这片针叶安排回原来的位置,因为这片针叶还有可能去阻碍别人,如果考虑逆转时间轴的实际意义,很容易说明这一点.
既然单从图论的角度难以直接解决问题,我们还是回归移动针叶被阻碍这件事的实际意义.
一片针叶 会对 造成阻碍,说明 的 坐标范围 与 是有交的,这里我们将 分为两种针叶,分别称作 类针叶和 类针叶:
- 类针叶: 包含 这个点,或者包含 这个点.
- 类针叶: 是 的中间一段,使得 且 .
考虑这些针叶,如何判断这些针叶到底会不会对 造成阻碍?这时就要看这些针叶的 坐标了,然后我们陷入了和一开始做第二问的时候同样的困境:怎么直接地求出两片针叶之间的阻碍关系呢?
注意到这里考虑到的所有针叶对 ,它们之间一定是存在阻碍关系的,要紧的只是关系的方向,需要知道存不存在 阻碍 的关系.
既然一定存在阻碍关系,那其实就好办了,还是回归那张等效图.
这时解法基本上已经呼之欲出了,我们不是求出了等效图拓扑序 吗,那对于我们已经知道确实存在阻碍关系的针叶对 ,如果 ,那就是 阻碍 ,否则就是 阻碍 啊.
可能会产生一个疑问:如果直接当作 去处理的话,两片 类针叶之间的阻碍关系是不是可能会误判呢?但其实这是不要紧的,因为我们根本不关心这些,我们只关心所有的针叶对 .
所以判断其实很简单:考虑所有坐标范围与 有交的针叶,如果这里面, 的最小值,都大于 的话,那么全是 阻碍 ,所以这一步移动 的操作一定是可行的,反之,则一定不可行;
需要用数据结构快速维护这个过程,不难想到线段树,具体过程如下:
-
将所有移动操作读入进来离线,逆转时间轴,逆序考虑所有的操作;
- 当然在这之前,要先离散化所有的坐标,注意离散化是在这一步才进行,而不是在一开始的时候就进行离散化,否则因为斜率等问题会产生错误.
-
建立两棵线段树 和 ;
-
设这一步移动操作移动的针叶编号是 , 的 坐标范围是 , 坐标范围是 :
- 设布尔标记 为真;
- 如果是操作 ,也就是向左移动:
- 在 中查询 的区间最大值,如果该值大于 ,就令 为假;
- 如果是操作 ,也就是向上移动:
- 在 中查询 的区间最小值,如果该值小于 ,就令 为假;
- 如果是操作 ,也就是向右移动:
- 在 中查询 的区间最小值,如果该值小于 ,就令 为假;
- 如果是操作 ,也就是向下移动:
- 在 中查询 的区间最大值,如果该值大于 ,就令 为假;
- 在 中以 的值更新区间 ;
- 在 中以 的值更新区间 ;
- 若 为假,记录目前的操作步骤 是不合法的;
最终最早的不合法步骤即为第一问的答案,可以正确回答所有数据点的第一问,时间复杂度为 ,空间复杂度为 ,可以获得这道题的 分.
常数主要在线段树上,如果写 zkw 线段树可以降低常数,但是考虑到 3 秒的时间限制,没有必要.
肝了 3.5h,接近 300 行、7.7 个 KB 的代码不得贴一下 qwq.
- 可能会新来一片针叶
- 1