1 条题解
-
0
自动搬运
来自洛谷,原作者为

SuperJvRuo
**搬运于
2025-08-24 21:36:28,当前版本为作者最后更新于2018-05-05 13:47:20,作者可能在搬运后再次修改,您可在原文处查看最新版自动搬运只会搬运当前题目点赞数最高的题解,您可前往洛谷题解查看更多
以下是正文
乍一看这题,二分半径,大力simpson啊!看我随手写一个,你看,样例都过了,我交一发......
WA*6+TLE*3+AC*1
半径只能二分解决,而面积,看来不是能用simpson水过的了。
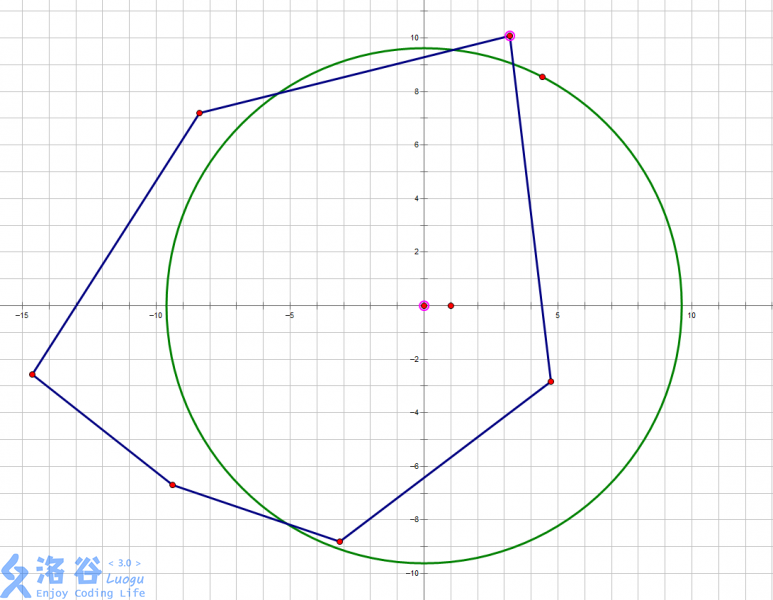
观察图形,利用题中多边形的性质,不难想出这样的搞法:
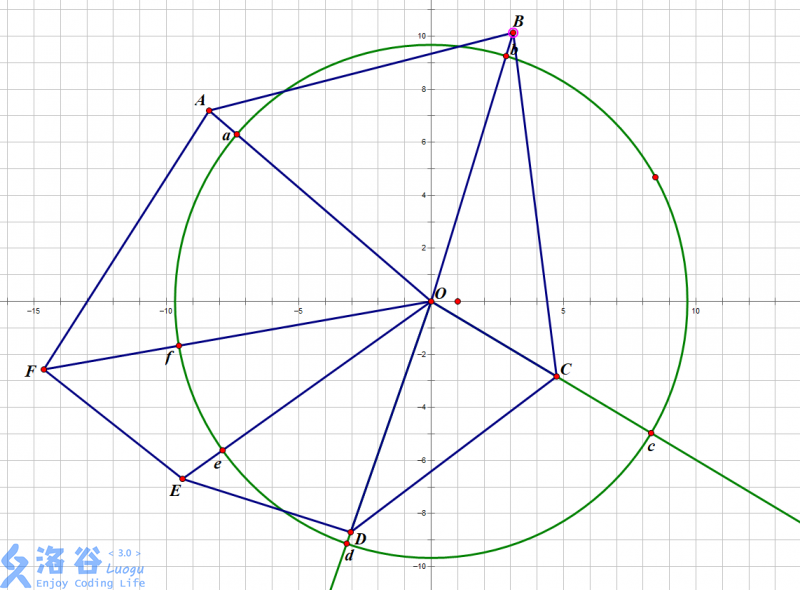
分别连接多边形的各个顶点与原点,将多边形划分为三角形。每个三角形都对应一个唯一的圆心角,在半径确定时,也就能确定一个对应的扇形。只需求出各个三角形与对应扇形面积交的和即可。
这里分为4种情况:
case 1
最简单的情况,如图中,三角形被扇形完全包含。那么面积交就是三角形的面积,即:。
case 2
稍微难一点的情况,如图中,三角形完全包含扇形。那么面积交就是扇形的面积,即:。
关于的求法,可以先用坐标分别求出两个点极角的余弦值,再用cmath里的acos函数求出两个极角的弧度。但注意,acos的返回值在间,因此还需要利用点的纵坐标正负,来确定是否大于,还要用“奇变偶不变,符号看象限”,去确定极角的弧度值。然后两角的极角作差,取绝对值,如果,还要取。即得的弧度。详见下面的代码。
case 3
前两种的结合,如图中,角所对的边和弧有且仅有一个交点。可以求出这个交点,然后对交点左右两部分分别用前两种方法求解。那么怎么求交点呢?
设两个点分别为。设直线的解析式为,则斜率,纵截距。圆的解析式为。
由直线解析式得:$$y^2=(kx+b)^2$$
由圆解析式得:$$y^2=r^2-x^2$$
因此有:$$(kx+b)^2=r^2-x^2$$
解得:$$x_1=\frac{-2kb+\sqrt{4k^2b^2-4(k^2+1)(b^2-r^2)}}{2k^2+2}$$
$$x_2=\frac{-2kb-\sqrt{4k^2b^2-4(k^2+1)(b^2-r^2)}}{2k^2+2} $$看看哪个点在线段上就行了。然后一侧求三角形面积,另一侧求扇形面积。
case 4
如果解决了前三种,第四种就不是问题了。如图中,角的对边与对弧有两个交点,可以将其分为两个case 3解决。
是不是很简单啊?
#include<cstdio> #include<cmath> #include<algorithm> #define EPS 1e-5 const double PI=acos(-1); int n; double s; struct Point { double dist,x,y; } point[55]; //求出线段上离原点最近的点,以确定线段与弧是否相交 Point calc_vertical(Point A,Point B) { Point cross; //两种特殊情况:与x轴垂直、与y轴垂直 if(fabs(A.x-B.x)<EPS) { cross.x=A.x; cross.y=0; cross.dist=fabs(A.x); } else if(fabs(A.y-B.y)<EPS) { cross.x=0; cross.y=A.y; cross.dist=fabs(A.y); } else//作垂线 { double k=(A.y-B.y)/(A.x-B.x); double b=A.y-k*A.x; cross.x=-b/(k+1.0/k); cross.y=-cross.x/k; cross.dist=sqrt(cross.x*cross.x+cross.y*cross.y); } //如果垂足不在线段上,就取两个端点中更近的一个 if(A.x>B.x) { std::swap(A,B); } if(cross.x<A.x||cross.x>B.x) { cross=A.dist<B.dist?A:B; } if(A.y>B.y) { std::swap(A,B); } if(cross.y<A.y||cross.y>B.y) { cross=A.dist<B.dist?A:B; } return cross; } //求线段与圆弧的交点 Point calc_cross(Point A,Point B,double radius) { Point res; if(A.x>B.x) { std::swap(A,B); } double k=(A.y-B.y)/(A.x-B.x); double b=A.y-k*A.x; res.x=(-2*k*b+sqrt(4*k*k*b*b-4*(b*b-radius*radius)*(k*k+1)))/(2*k*k+2); if(res.x<A.x||res.x>B.x) { res.x=(-2*k*b-sqrt(4*k*k*b*b-4*(b*b-radius*radius)*(k*k+1)))/(2*k*k+2); } res.y=res.x*k+b; res.dist=sqrt(res.x*res.x+res.y*res.y); return res; } double mult(Point a,Point b)//向量的向量积的模除以2 { return fabs(a.x*b.y-b.x*a.y)/2.0; } double calc_angle(Point a)//计算极角 { double cosine=a.x/a.dist; double res=acos(cosine); return a.y>0?res:2*PI-res; } double calc_sector(Point a,Point b,double radius)//计算扇形面积 { double angle=fabs(calc_angle(a)-calc_angle(b)); angle=angle<PI?angle:2*PI-angle; return radius*radius*angle/2.0; } double calc_part(Point a,Point b,double radius)//计算面积交 { if(a.dist-radius<EPS&&b.dist-radius<EPS) { return mult(a,b); } else { if(a.dist>b.dist) { std::swap(a,b); } Point vertical=calc_vertical(a,b); if(vertical.dist-radius>EPS) { return calc_sector(a,b,radius); } else if(a.dist-radius>EPS) { return calc_part(a,vertical,radius)+calc_part(vertical,b,radius); } else { Point cross=calc_cross(a,b,radius); return calc_sector(cross,b,radius)+mult(a,cross); } } } double calc_area(double radius) { double res=0; double add; for(int i=0; i<n; ++i) { res+=add=calc_part(point[i],point[i+1],radius); } return res; } int main() { double left_radius=0,right_radius=0,mid_radius; scanf("%d %lf",&n,&s); for(int i=0; i<n; ++i) { scanf("%lf %lf",&point[i].x,&point[i].y); point[i].dist=sqrt(point[i].x*point[i].x+point[i].y*point[i].y); right_radius=std::max(right_radius,point[i].dist); } point[n]=point[0]; while(right_radius-left_radius>EPS)//二分半径 { mid_radius=(left_radius+right_radius)/2.0; if(calc_area(mid_radius)>s) { right_radius=mid_radius; } else { left_radius=mid_radius; } } printf("%.2lf\n",mid_radius); return 0; }
- 1