1 条题解
-
0
自动搬运
来自洛谷,原作者为

Souture
**搬运于
2025-08-24 23:13:06,当前版本为作者最后更新于2025-04-13 18:56:04,作者可能在搬运后再次修改,您可在原文处查看最新版自动搬运只会搬运当前题目点赞数最高的题解,您可前往洛谷题解查看更多
以下是正文
题目大意
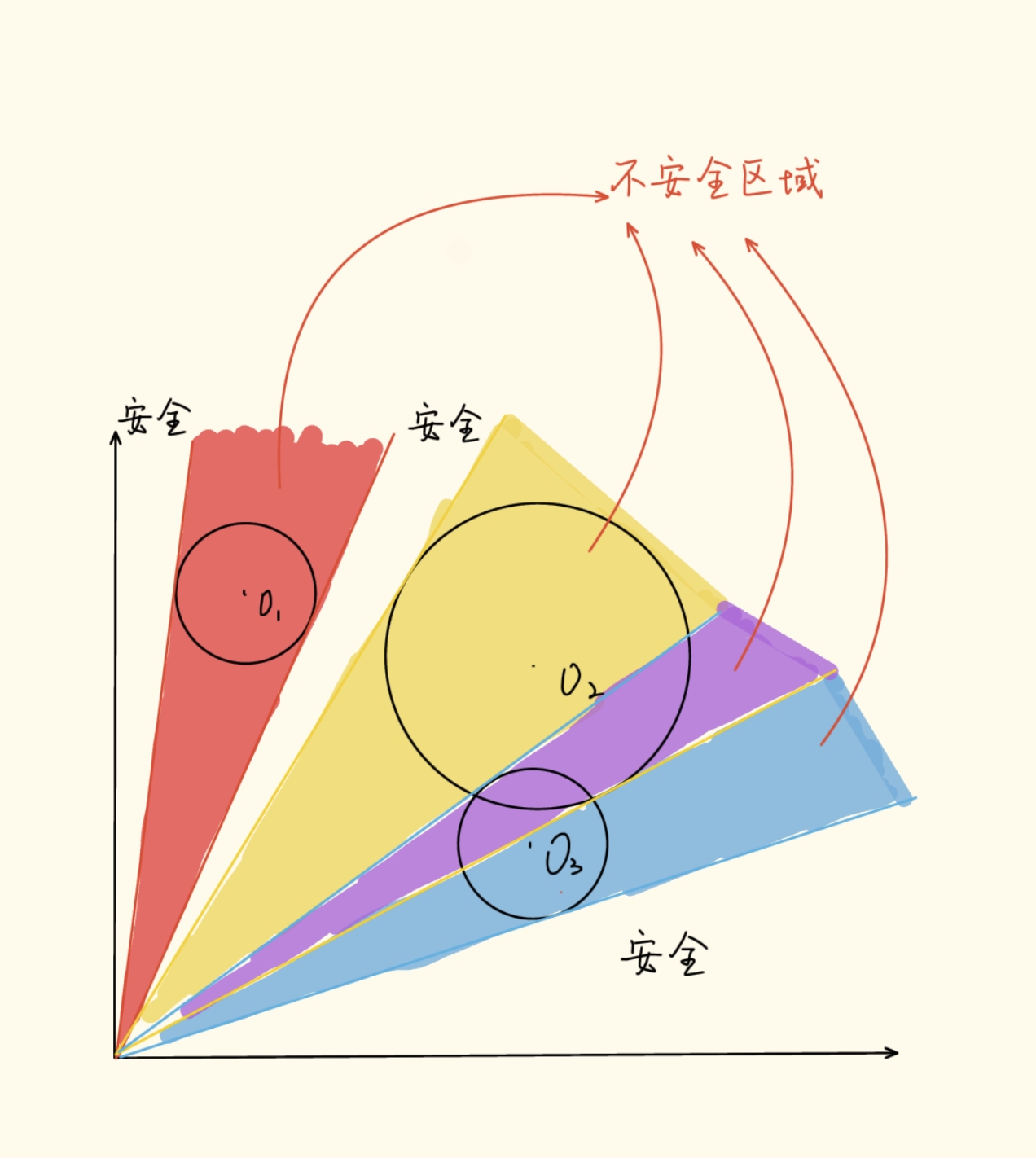
在二维平面上有 $$n$$ 个地雷,地雷的覆盖范围可以看成一个圆,第 $$i$$ 个地雷的位置为 $$(x_i, y_i)$$,半径为 $$r_i$$,你要从原点 $$(0, 0)$$ 走直线出发,方向限制在 $$\left[0, \frac{\pi}{2}\right]$$ (第一象限),求你走的直线与任何一个圆不交的概率。
如图:
思路
由于是要求概率,我们设与平面上所有圆不交的角度之和为 $$\theta$$ 不难想到答案是:
直接求与圆不交的角度和很困难,考虑单个圆单独处理,先求直线与每个圆相交的角度和 $$ \alpha$$ ,最后用 $$\frac{\pi}{2} - \alpha $$ 表示 $$ \theta $$。
转换为角度区间
对于每个地雷,先计算其与原点连线的方向角
如图:
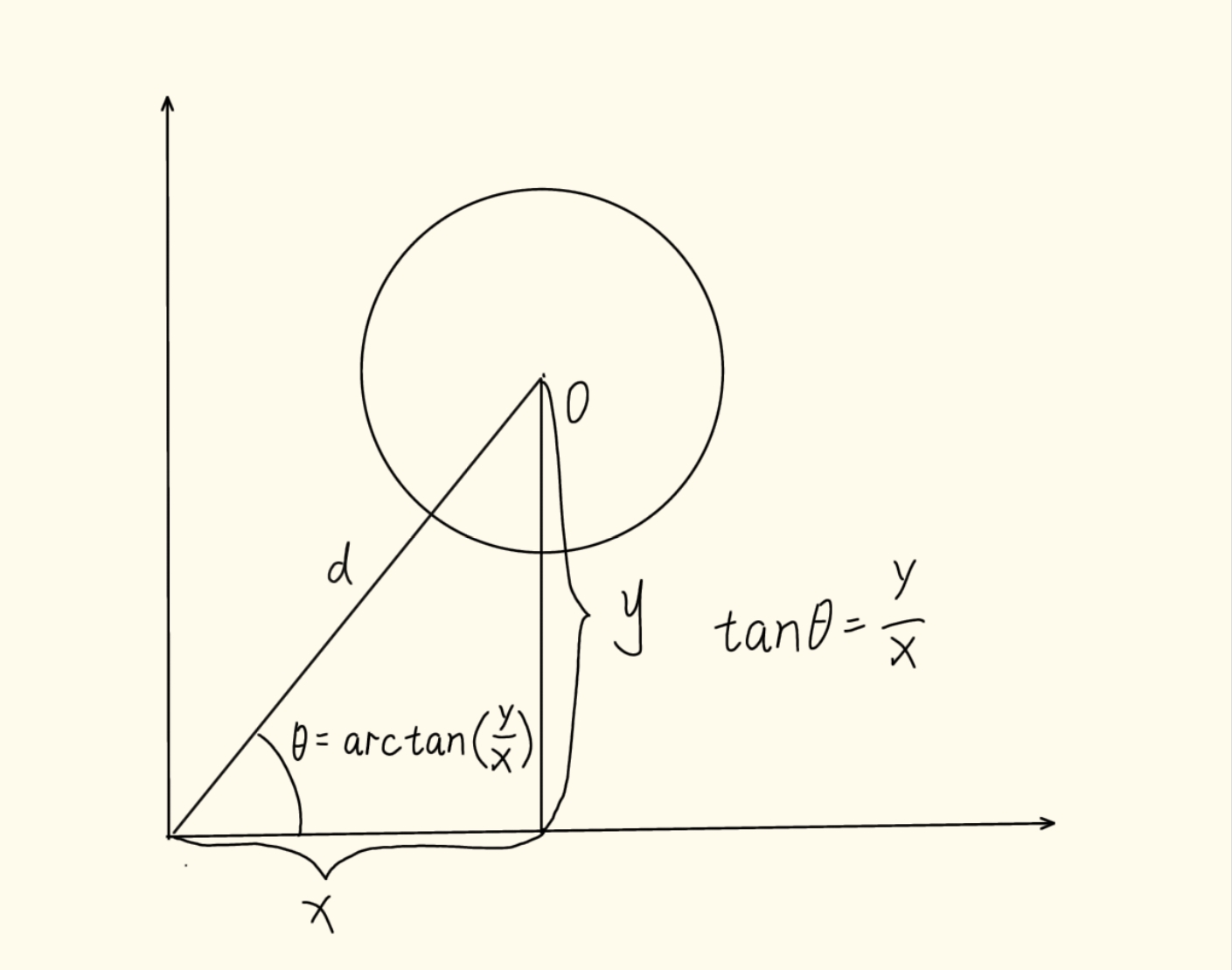
以及原点到地雷的距离
地雷影响的方向范围为
其中
如图:
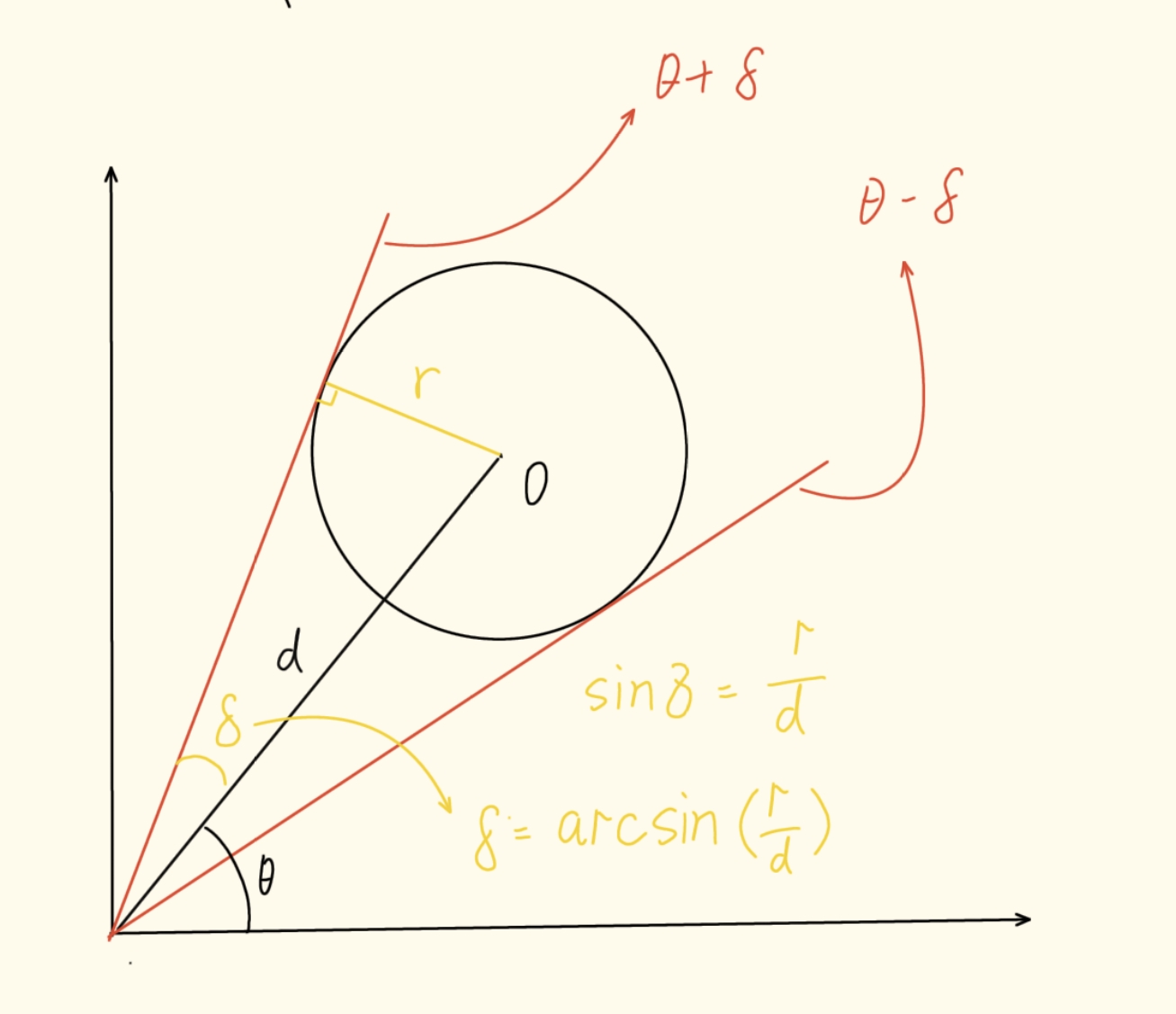
由于题目保证了 $$r_i < \min{(x_i, y_i)}$$,所以不需要对边界进行处理,即
$$\left[\theta-\delta,\ \theta+\delta\right] \subset \left[0, \frac{\pi}{2}\right] $$扫描线
显然我们对每个圆的区间计算后位置很乱,考虑将所有地雷对应的角度区间排序后,利用扫描线合并所有重叠的区间,从而得出不安全角度 $$ \alpha $$ 的总长度。
我们记扫描线为 $$line$$ :
假设已经按区间的左端点 $$L$$ 从小到大排序。那么,对于每个区间 $$[L, R]$$:
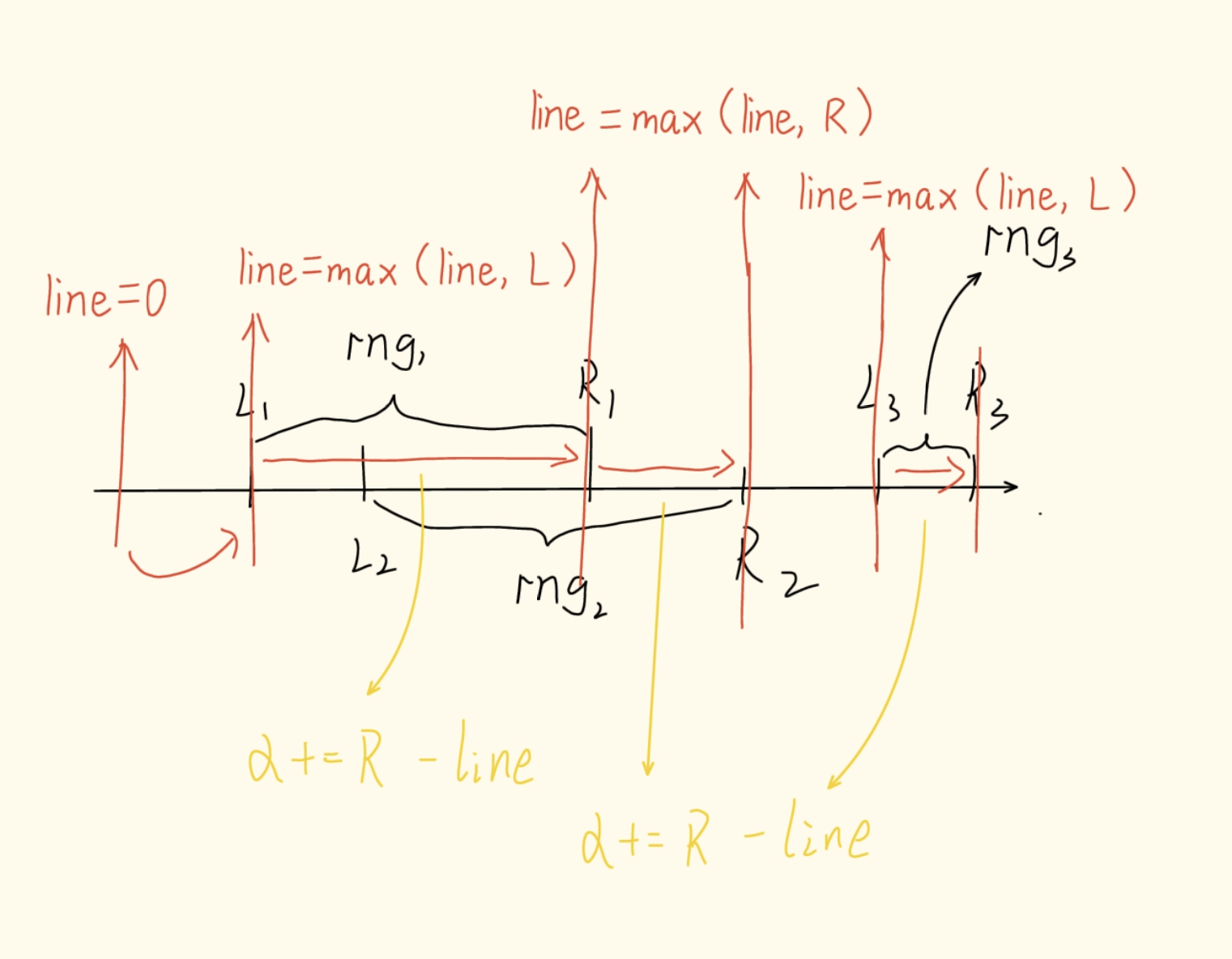
每次定位扫描线
如果当前区间的左端点 $$L$$ 在 $$line$$ 之前,说明新区间与之前的合并区间已有重叠,此时将 $$line$$ 保持在合并区间的右边界。
如果 $$L$$ 大于 $$line$$,表示上一个合并区间结束,扫描线移动到新区间起始点开始计算新的覆盖部分。
累加新覆盖的部分
这一步计算当前区间 [$$L, R$$] 对比扫描线位置 $$line$$ 之后,新扩展出来的部分。如果 $$R > line$$,则 $$R - line$$ 就是当前区间新增的长度;否则没有新增部分。
更新扫描线位置
确保扫描线总是记录已合并区间最新的右边界,便于后续区间计算合并长度。
如图:
计算结果
安全角度的角度和 $$\theta$$ 为
最终通关概率为
$$\text{ans} = \frac{\theta}{\frac{\pi}{2}} = \frac{\frac{\pi}{2} - \alpha}{\frac{\pi}{2}} $$小技巧
基于C++的库函数,我们可以使用
来获得高精度的常量 $$\pi$$ 。
代码
#include <bits/stdc++.h> using namespace std; #define endl '\n' #define all(v) v.begin(), v.end() const double PI = acos(-1); void sol() { int n; cin >> n; vector<tuple<int,int,int>> p(n); for (int i = 0; i < n; i++) { int x, y, r; cin >> x >> y >> r; p[i] = {x, y, r}; } vector<pair<double,double>> rng; for (auto &[x, y, r] : p) { double t = atan2(y, x); double d = sqrt(x * x + y * y); double det = asin(r / d); double L = t - det, R = t + det; rng.push_back({L, R}); } sort(all(rng), [&](auto a, auto b) { return a.first < b.first; }); // 扫描线 double line = 0; double res = 0; for (auto &[L, R] : rng) { line = max(line, L); res += max(0.0, R - line); line = max(line, R); } double ans = (PI / 2 - res) / (PI / 2); cout << fixed << setprecision(3) << ans << endl; } int main() { ios::sync_with_stdio(false); cin.tie(nullptr); sol(); return 0; }
- 1