1 条题解
-
0
自动搬运
来自洛谷,原作者为

brofea5
人生就像动态规划,在早已给定的值里反反复复地找最优解搬运于
2025-08-24 23:12:58,当前版本为作者最后更新于2025-04-12 18:45:28,作者可能在搬运后再次修改,您可在原文处查看最新版自动搬运只会搬运当前题目点赞数最高的题解,您可前往洛谷题解查看更多
以下是正文
题意
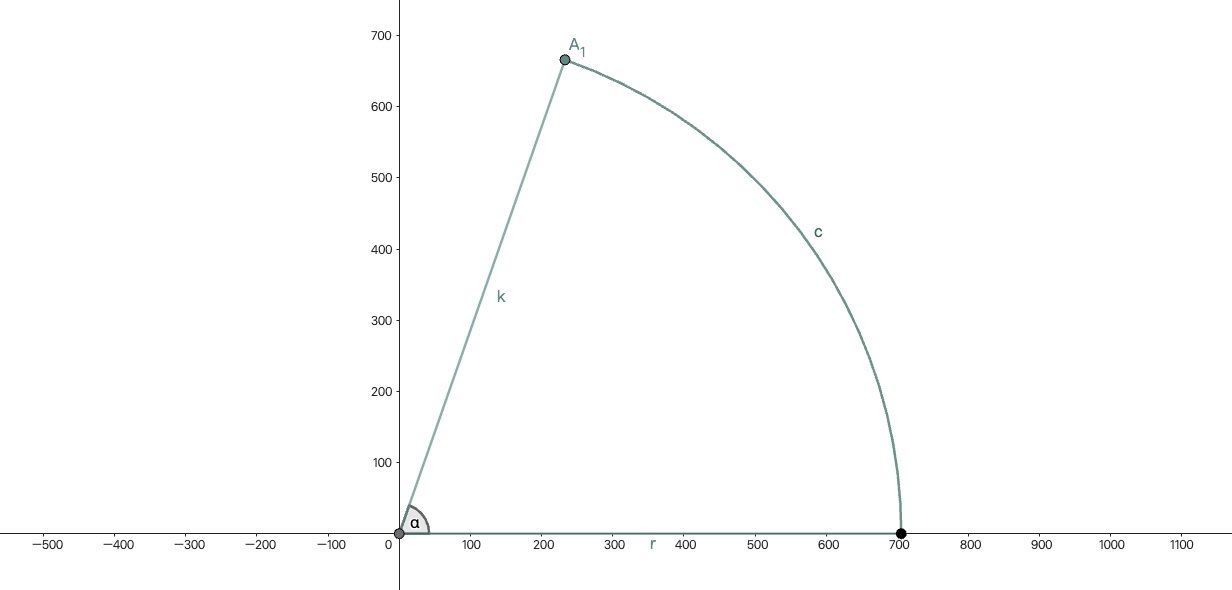
一个点有两种移动方式,沿着 轴正方向移动、以原点为圆心旋转,问走到点 需要经过的路程
答案四舍五入至整数
思路
答案很简单,计算原点到 的距离 ,沿着 移动 ,再旋转至终点
旋转的角度
最终的路程就是:(四舍五入至整数)
$$S=r+\frac\alpha{2\pi}\cdot 2\pi r=r(1+\arcsin(666/r))\approx 1576 $$如果忘记 C++ 有
asin()函数( 函数)了怎么办呢?- 用
sin()函数数值逼近,可以从 0.0000001 循环到 3.1400000,也可以用二分 - 在终端里用 python 的
math.asin()函数 - 用 Excel 的 ASIN() 函数,如果不记得函数名可以在“告诉我”中搜索“函数”并寻找反函数
- 泰勒展开
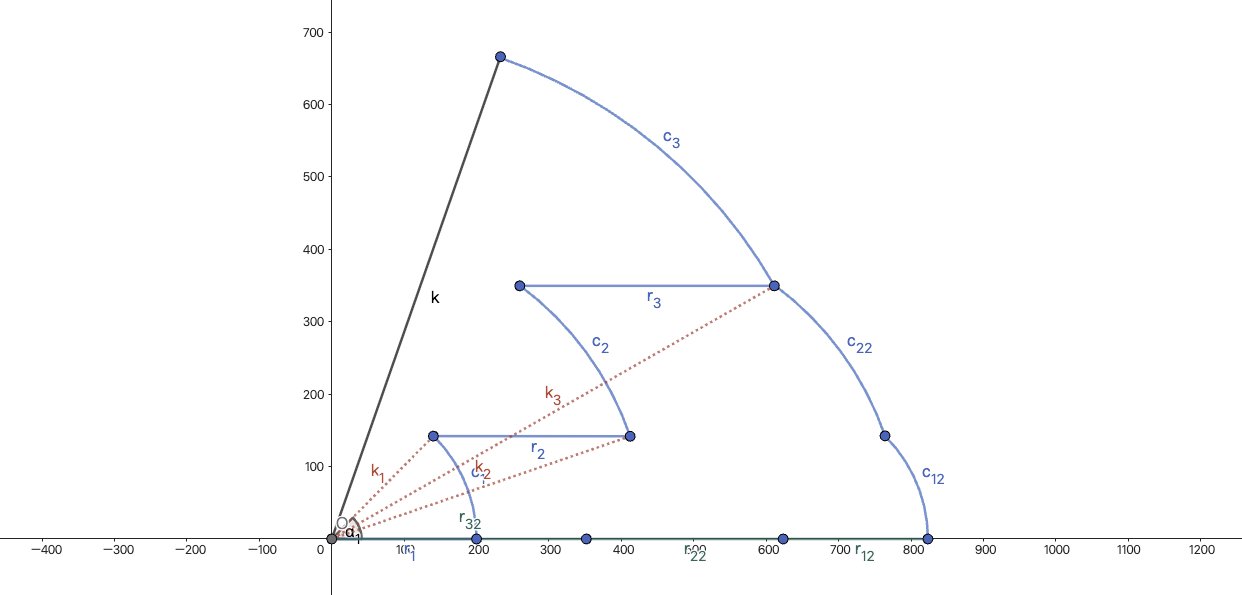
要证明这个走法就是最佳的其实还挺麻烦,不过在几何上就比较好理解,假设有这么一条路径
把所有圆弧平移到右侧首尾相连,把所有线段平移到 轴上,可以看出线段一定长于原本的 ,圆弧和一定长于原本的 (可以用三角不等式证明)
严谨来说,应该用微积分证明,我们将每一次移动都看作是微小的坐标变化
对于点 ,旋转微小角 的距离变化为 ,旋转,则路程为 ,对于沿 轴平移,路程为 ,此时 ,随着 增大而增大
极小时,约束条件可为:
$$\sum_{i\in T} \delta x_i +\sum_{j\in R} (-y_j\,d\theta_j) \;=\;233 ,\sum_{j\in R} x_j\,d\theta_j\;=\;666 $$综上可以构造拉格朗日函数:
$$\mathcal{L}=\sum_{i\in T} \delta x_i+\sum_{j\in R} r_j\,d\theta_j +\lambda\Biggl( \sum_{i\in T} \delta x_i +\sum_{j\in R} (-y_j\,d\theta_j)-233\Biggr) +\mu\Biggl(\sum_{j\in R} x_j\,d\theta_j-666\Biggr)\,, $$对 求偏导数,可以求出 ,然后考虑旋转的部分,可以设
$$f_j = r_j\,d\theta_j -\lambda\,y_j\,d\theta_j+\mu\,x_j\,d\theta_j=d\theta_j\Bigl(r_j + y_j+\mu\,x_j\Bigr)\,. $$求偏导后可知,每个旋转操作要满足:
$$\frac{\partial f_j}{\partial (d\theta_j)}=r_j + y_j+\mu\,x_j=0\tag1 $$注意到每次旋转都是绕原点进行, 由之前的运动决定,而又要使得在每个旋转的贡献中使得 保持一致,则各个旋转都必须满足上式
考虑理想的候选方案,设目标点为 若先水平平移至 ,则对于所有在这点的旋转操作都有
正好满足(1)且每个旋转必要条件一致
若在平移未完成前旋转,即 或 。将(1)写为:
若在平移还未完成时就引入旋转,那么(1)要求的 会因不同步而不可能一致地取一个常数,而会取一个更“严格”的值,使得后续整体代价增大,也就是说无法找到一个 满足所有旋转步都不发生效率损失
在这道题中, 恒定事实上使得 为一个差为 的等差旋转角,也就是说,每次都旋转 走到终点的路径就是最短的,对于任何终点都成立,这点在几何上不难证明
走多少次都是一样的,那就走一次吧
AC 代码:
#include <bits/stdc++.h> int main() { double r = sqrt(233 * 233 + 666 * 666); int res = r + asin(666.0 / r) * r; std::cout << res; } - 用
- 1