1 条题解
-
0
自动搬运
来自洛谷,原作者为

strcmp
每一个不曾起舞的日子,都是对生命的辜负搬运于
2025-08-24 21:13:51,当前版本为作者最后更新于2022-02-14 14:41:34,作者可能在搬运后再次修改,您可在原文处查看最新版自动搬运只会搬运当前题目点赞数最高的题解,您可前往洛谷题解查看更多
以下是正文
看见没有 ISAP 的题解,蒟蒻刚学 ISAP 就贡献一个吧。
步入正题
1.ISAP 算法是什么?
是一种计算网络流的高效最短增广路算法,它其实是优化版的最短增广路算法,最短增广路算法即 EK 算法。
2.Dinic 算法和 ISAP 算法的区别?
Dinic 算法每次 DFS 后,会从源点 到汇点 进行一次 BFS 来维护层次图。但 ISAP 算法从始至终只进行一次从汇点 到源点 的 BFS,但 DFS 的时候要同时维护结点的深度。
3.ISAP 算法具体有哪些步骤?
1.首先,从汇点 到源点 进行一次 BFS。
2.然后,每次沿着深度连续的结点进行增广,然后更新路径上的结点深度。
3.如果某个深度不存在或者源点 的深度大于等于结点个数 时结束,否则转步骤 2(不是转步骤 1)
ISAP 的神奇之处在于它不用再进行 BFS 就能维护层次图。
首先是初始化历程,这里使用链式前向星进行存图。
#define inf 1000000000000000 #define V 20010 #define E 500010 typedef long long int ll; struct edge { public: int to, next; ll capa; }; int cnt = 0, head[V]; int n, m; vector<edge>node(E); inline void add(int fir, int nxt, ll w) { node[cnt].to = nxt; node[cnt].capa = w; node[cnt].next = head[fir]; head[fir] = cnt; ++cnt; } int s, t, dep[V], gap[V], cur[V]; queue<int>que; ll sum = 0; inline void initing() { memset(dep, -1, (n + 1) * sizeof(int)); memcpy(cur, head, (n + 1) * sizeof(int)); }其中有三个新数组:分别是 , 和 。
用于“当前弧优化”,将于后面介绍,那 和 是指什么呢?
在图 中, 可以对应于一个新函数 。
它代表这个结点的深度。你先不要纠结深度是什么,下面会讲。
同样, 也可以对应一个新函数。
$$\operatorname{gap}(d),d \in \operatorname{deep(u)},u \in V $$它代表这个深度对应的结点数。
那它们有什么用呢?
先放图。
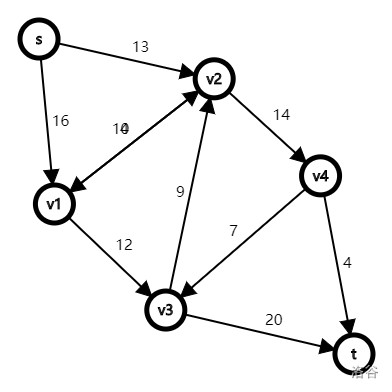
因为工具的限制,反向弧以及结点 和 之间的重边无法正常展示。
ISAP 会先用 BFS 造层次图。注意是从汇点 开始 BFS ,不是从源点 开始的。
下面是 BFS 后图的状态。
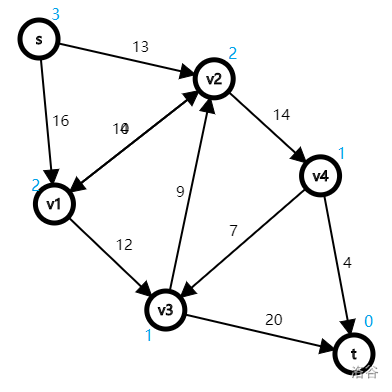
具体过程如下:
1.将汇点 入队。
2.遍历队首结点每个出边,将边对应的结点入队,入队的结点深度为队首结点深度 +
3.将队首结点出队,如果队列不为空,转步骤 ,否则直接结束
注意,这里有一个坑点:
if (dep[ito] == -1)BFS 的时候一定只通过深度判定是否遍历过,不能判定边权大小,因为初始反向边是没有边权的,而我们因为是从汇点 开始 BFS 的,所以要通过反向边才能到达源点 。
代码如下:
void bfs() { int fro, i, ito; que.push(t); deep[t] = 0; ++gap[deep[t]]; while (!que.empty()) { fro = que.front(); que.pop(); for (i = head[fro]; i != -1; i = node[i].next) { ito = node[i].to; if (deep[ito] == -1) {//不要特判边权为 0 deep[ito] = deep[fro] + 1; que.push(ito); ++gap[deep[ito]];//别忘了给 gap 加 1 } } } }有了这个深度有什么用呢?能让我们找到的增广路一定是最短增广路。
怎么走呢?
首先给 DFS 两个参数:“当前结点 ” 和 “从 到 增广路径上最小边权 ”。再加上一个变量:“当前结点已经增广出去的流量 ”。
记住下面几个原则:
1.从源点 开始 DFS。
2.只沿着深度连续的增广路径增广,只通过边权不为 的边增广。
3.当 等于 时及时停止。
4.当增广后 小于 时将结点 的深度 +。
先看看代码感受一下。
ll dfs(int u, ll flow) { if (u == t || flow == 0)return flow; ll used = 0; for (int i = cur[u]; i != -1; i = node[i].next;) { cur[u] = i; if (dep[u] == dep[node[i].to] + 1 && node[i].capa > 0) { ll wei = dfs(node[i].to, min(flow - used, node[i].capa)); if (wei) { node[i].capa -= wei; node[i ^ 1].capa += wei; used += wei; } } if (used == flow)return used; } if (used > flow)used = flow; if (used < flow) { --gap[dep[u]]; if (!gap[dep[u]])dep[s] = n + 1; ++gap[++dep[u]]; } //这里的 if 语句才是与 Dinic 算法真正的不同之处 return used; }你大概听说过一个与 ISAP 几乎一致的算法:“Dinic 算法”。
Dinic 算法与 ISAP 算法有一点不一样: Dinic 在 DFS 后直接暴力 BFS 维护层次图,但是 ISAP 却在 DFS 的时候也在维护层次图。这一点不同导致 ISAP 算法的运行速度往往比 Dinic 算法快上数倍。
ISAP 算法是这样维护层次图的:如果从上一个结点传过来的流量大于从这个结点增广出去的流量,那么将这个结点的深度 +。
就是这么简洁。
你可能还想问:“为什么 ‘当增广后 小于 时将结点 的深度 +’ 呢?”
请看:
if (used < flow) { --gap[dep[u]]; if (!gap[dep[u]])dep[s] = n + 1; ++gap[++dep[u]]; }ISAP 的思想在这短短的几行代码里表现得淋漓尽致。
为什么这是对的?
假设有一个结点 是当前 DFS 考虑的结点,并且我们知道汇点 的深度是不变的,因为我们遇到了汇点 就
return,而源点 的深度是每轮必变的,因为初始源点 的 是 。这可以推导出一个很重要的结论:“当前 DFS 找到的增广路径长度相等且都等于 ”。
这意味着如果有一个结点 , 从 增广出去的流量小于增广路径上最小边权的容量,也就意味着经过 的所有长度等于 的增广路都已经被增广过了,而且通过这个结论我们也可以证明,所有长度小于 的增广路都已经被增广完了。
这时候将结点 的深度提高,相当于通过结点 的增广路径长度变长了,也就能增广其他比原本的增广路更长的增广路了。
结束条件, gap 优化以及当前弧优化
while (dep[s] < n) { sum += dfs(s, inf); memcpy(cur, head, (n + 1) * sizeof(int)); }这是运行 ISAP 的核心代码之一。
可以看到结束条件是
dep[s]<n。为什么呢?因为增广路最长只有 ,
dep[s]等于 时增广路肯定都找完了。那 gap 优化又是优化到那里了呢?
if (used < flow) { --gap[dep[u]]; if (!gap[dep[u]])dep[s] = n + 1; ++gap[++dep[u]]; }无比的合理,当一个深度对应的结点数目为 的时候,那么就会形成断层,也就找不到增广路了,找不到增广路就说明已经是最大流了。这里利用
dep[s]=n+1还能使程序少一个特判。程序还使用了一个优化:“当前弧优化”。
当前弧优化的核心在这里:
for (int i = cur[u]; i != -1; i=node[i].next) { cur[u] = i; ... }这里的作用是:当我们再次遍历到这个点时,前面的边肯定已经被增广完了,就没必要再走了,在这里进行一次剪枝,速度也极大提升。
ISAP 的正确性:
在图 中,很显然源点 的深度在每次 DFS 后都会提高,并且每次 DFS 都找的是最短增广路,如果一直没出现断层,定义函数 为结点 的深度。 最多会跑 次增广路,可以证明,当 时必定出现断层,也就不存在增广路径,因此 ISAP 算法找出的一定是最大流。
时间复杂度分析:
在图 中,BFS 是 的,几乎不影响总时间复杂度。显然,每次 DFS 后,源点 到汇点 的距离都会增加 ,最多进行 次 DFS,直观上看, 比 的阶小,因此共进行 次 DFS,每次构造出一个新的层次图,图上最多有 个增广路,寻找每个增广路的时间最多是 的,所以 ISAP 算法的时间复杂度上限为 。
证毕。
ACcode
#include <bits/stdc++.h> using namespace std; #define inf 1000000000000000 #define V 50010 #define E 1000010 typedef long long int ll; struct edge { public: int to, next; ll capa; }; int cnt = 0, head[V]; int n, m; vector<edge>node(E); inline void add(int fir, int nxt, ll w) { node[cnt].to = nxt; node[cnt].capa = w; node[cnt].next = head[fir]; head[fir] = cnt; ++cnt; } int s, t, deep[V], gap[V], cur[V]; queue<int>que; ll sum = 0; inline void initing() { memset(deep, -1, V * sizeof(int)); memcpy(cur, head, (n+1)*sizeof(int)); } inline void bfs() { int fro, ito; que.push(t); deep[t] = 0; ++gap[deep[t]]; while (!que.empty()) { fro = que.front(); que.pop(); for (register int i = head[fro]; i != -1; i = node[i].next) { ito = node[i].to; if (deep[ito] == -1) { deep[ito] = deep[fro] + 1; que.push(ito); ++gap[deep[ito]]; } } } } ll dfs(int u, ll flow) { if (u == t || flow == 0)return flow; ll used = 0,wei=0; for (int i = cur[u]; i != -1; i = node[i].next) { cur[u] = i; if (deep[u] == deep[node[i].to] + 1 && node[i].capa > 0) { wei = dfs(node[i].to, min(flow - used, node[i].capa)); if (wei) { node[i].capa -= wei; node[i ^ 1].capa += wei; used += wei; } } if (used == flow)return used; } if (used < flow) { --gap[deep[u]]; if (!gap[deep[u]])deep[s] = n + 1; ++gap[++deep[u]]; } return used; } ll ISAP() { initing(); bfs(); while (deep[s] < n) { sum += dfs(s, inf); memcpy(cur, head, (n+1) * sizeof(int)); } return sum; } int main() { ios::sync_with_stdio(0); memset(head, -1, V*sizeof(int)); cin >> n >> m >> s >> t; int f, n; ll w; for (register int i = 0; i < m; i++) { cin >> f >> n >> w; add(f, n, w); add(n, f, 0); } cout << ISAP(); return 0; }
- 1